13 March 2023
If there is a fire breakout in the International Space Station (ISS), will the fire propagate as if on Earth?
There are these fantastic experiments done onboard ISS that reveal how physical phenomena behave differently under microgravity conditions. To study how physical and biological processes behave in microgravity conditions, we need to create microgravity. ISS naturally has microgravity, but access to ISS as an experimental platform is limited and expensive. A facility that allows us to simulate microgravity on Earth is a drop-tower — a tall tower from which the experimental set-up can be ‘dropped’ and the set-up experiences microgravity during the resultant free-fall. Building these tall drop-towers takes time and is costly.
Siddhardha, as part of his PhD thesis, proposed that multirotors can be turned into microgravity platforms. Thus, now we have a portable, cheap, and versatile microgravity platform.
In this age, when we are seriously thinking about space colonization, it is crucial to know how plants grow, how the body responds, how fire propagates, and so on in microgravity. Not only microgravity environments matters, but also hypo- and hyper-gravity environments too, if, for example, we need to settle on Mars and Jupiter, respectively.
So, how can we conduct microgravity experiments on Earth? The key to experiencing microgravity is 'free-fall'. The ISS, orbiting around Earth, is in free-fall. Anything falling is also in free-fall; well, almost in free-fall! The atmospheric drag prevents a pure free-fall. However, if the drag can be exactly compensated, then we have a perfect free-fall.
The thrust created by the propellers of a multirotor can be used to compensate drag. If the sum of thrust and drag forces on a multirotor is zero, then it is in a perfect free fall. That is what Siddhardha's control algorithm aims to achieve.
To compensate for drag exactly, the drag that the multirotor is experiencing needs to be known precisely. Even if a good estimate of drag is available, to producing exactly that much thrust is challenging in the presence of uncertinities.
The integrated estimation and control algorithm that Siddhardha proposed in his PhD thesis makes it possible — to maintain a constant acceleration. The algorithm works even without precise knowledge of drag and thrust. Since any acceleration can be maintained, the multirotor, and therefore the payload onboard (the experimental set-up), can experience not only microgravity, but also hypo- and hyper-gravity as needed.
Siddhardha's work was widely covered by the media. Read a sample here.
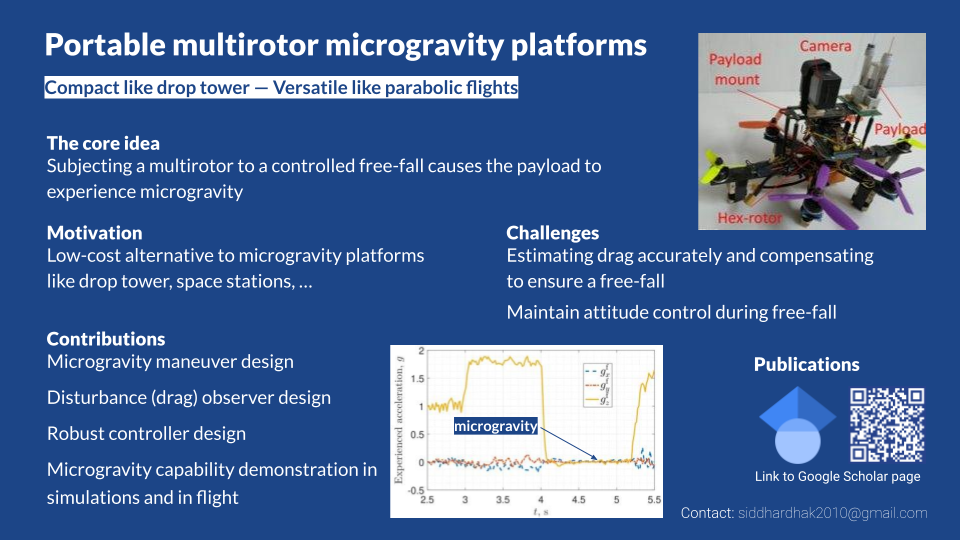
Siddhardha’s PhD work is summarized in the graphical abstract below.