02 April 2024
Traditionally, microgravity research has been done in space stations or by dropping payloads from towers or balloons. These methods are great, but they can be expensive and have limited availability.
 In a previous post, I talked about Siddhardha’s thesis that multirotors can be turned into microgravity platforms.
In fact, he showed that every multirotor has the capability to be a microgravity platform.
Multirotor microgravity platforms provide scientists with an affordable way to conduct experiments under near weightlessness conditions.
But how do you choose the appropriate multirotor UAV for your microgravity experiment?
In a previous post, I talked about Siddhardha’s thesis that multirotors can be turned into microgravity platforms.
In fact, he showed that every multirotor has the capability to be a microgravity platform.
Multirotor microgravity platforms provide scientists with an affordable way to conduct experiments under near weightlessness conditions.
But how do you choose the appropriate multirotor UAV for your microgravity experiment?
In a recent work published in Microgravity Science and Technology, Siddhardha and I laid down a framework for assessing the microgravity-producing capabilities of a multirotor UAV. Using our framework, you can estimate the g-time that a particular multirotor can provide while carrying the experimental setup of a specified weight.
(The above AI-generated image, put in here for a visual appeal, was generated using Bing.)
The proposed framework focuses on three key factors:
Microgravity duration (0g-time): This is simply how long the payload experiences near weightlessness. Our framework helps determine how long a specific drone platform can maintain the conditions needed for your experiment.
Maximum payload capacity: This metric considers how much weight the drone can carry while still achieving microgravity. The framework helps you pick a drone that can handle your experiment’s equipment.
Microgravity quality (0g-quality): During microgravity periods, since the rotors are rotating to overcome drag, thereby enabling free-fall (microgravity), the payload will experience vibrations. Our framework incorporates methods to estimate these disturbances and assess how well-suited a particular drone is for your experiment’s sensitivity requirement.
By considering such factors, researchers can choose the most appropriate multirotor platform for their microgravity research. The article considers many other factors, too. Take a look at the paper for further details.
A graphical abstract of our paper is given below.
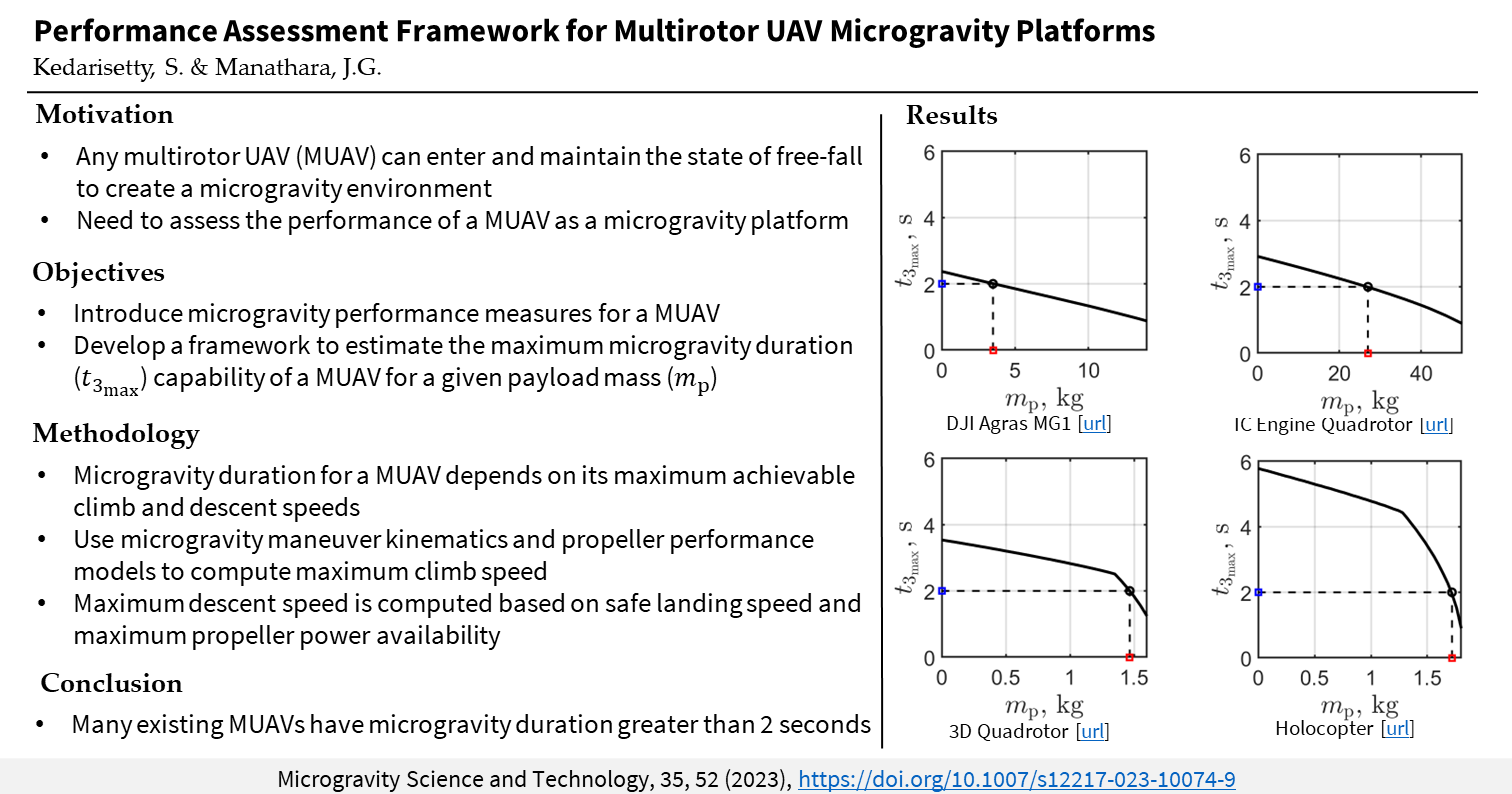
We evaluated the performance as a microgravity platform of several existing multirotor UAVs of various configurations, masses, sizes, and thrust capabilities. This analysis revealed that there exist multirotors that can provide microgravity for more than 4s 0g-time while carrying more than 1 kg payloads. On the other hand, we also showed that some existing multirotors can carry payloads heavier than 90 kgs and provide microgravity for 2s, which is comparable to the capability of some of the drop tower facilities.